Dina widang manufaktur éléktronik anu gancang sareng presisi tinggi, adaptor uji jarum éléktronik janten penjaga gerbang anu mastikeun kualitas PCB, chip, sareng modul. Nalika jarak pin komponén beuki leutik sareng kompleksitas uji ningkat, paménta pikeun presisi sareng reliabilitas dina uji parantos ngahontal tingkat anu teu acan pernah aya. Dina révolusi pangukuran presisi ieu, motor stepper mikro maénkeun peran anu teu tiasa dipisahkeun salaku "otot anu presisi". Artikel ieu bakal ngabahas kumaha inti daya alit ieu jalan sacara tepat dina adaptor uji jarum éléktronik, ngadorong uji éléktronik modéren kana jaman énggal.
一.Bubuka: Nalika akurasi uji diperyogikeun dina tingkat mikron

Métode uji tradisional geus teu nyukupan pikeun kabutuhan uji pakét BGA, QFP, jeung CSP micro-pitch ayeuna. Tugas inti adaptor uji jarum éléktronik nyaéta pikeun ngajalankeun puluhan atawa malah rébuan probe uji pikeun ngadegkeun sambungan fisik jeung listrik anu bisa diandelkeun jeung titik uji dina unit anu diuji. Sagala misalignment minor, tekanan anu teu rata, atawa kontak anu teu stabil bisa ngabalukarkeun kagagalan uji, salah penilaian, atawa malah karusakan produk. Motor stepper mikro, kalayan kontrol digital anu unik jeung karakteristik presisi tinggi, geus jadi solusi anu idéal pikeun ngungkulan tantangan ieu.
一.Mékanisme kerja inti motor stepper mikro dina adaptor

Operasi motor stepper mikro dina adaptor uji jarum éléktronik sanés rotasi anu saderhana, tapi runtuyan gerakan anu tepat sareng terkoordinasi. Alur kerjana tiasa dibagi kana léngkah-léngkah inti ieu:
1. Alignment sareng posisi awal anu tepat
Alur kerja:
Pitunjuk panampi:Komputer host (test host) ngirimkeun data koordinat komponén anu badé diuji ka kartu kontrol gerakan, anu ngarobihna janten runtuyan sinyal pulsa.
Gerakan konvérsi pulsa:Sinyal pulsa ieu dikirim ka panggerak motor micro stepper. Unggal sinyal pulsa ngagerakkeun aci motor pikeun muterkeun sudut anu tetep - "sudut léngkah". Ngaliwatan téknologi drive microstepping anu canggih, sudut léngkah lengkep tiasa dibagi deui kana 256 atanapi langkung microsteps, sahingga ngahontal kontrol pamindahan tingkat mikrométer atanapi bahkan tingkat submikrométer.
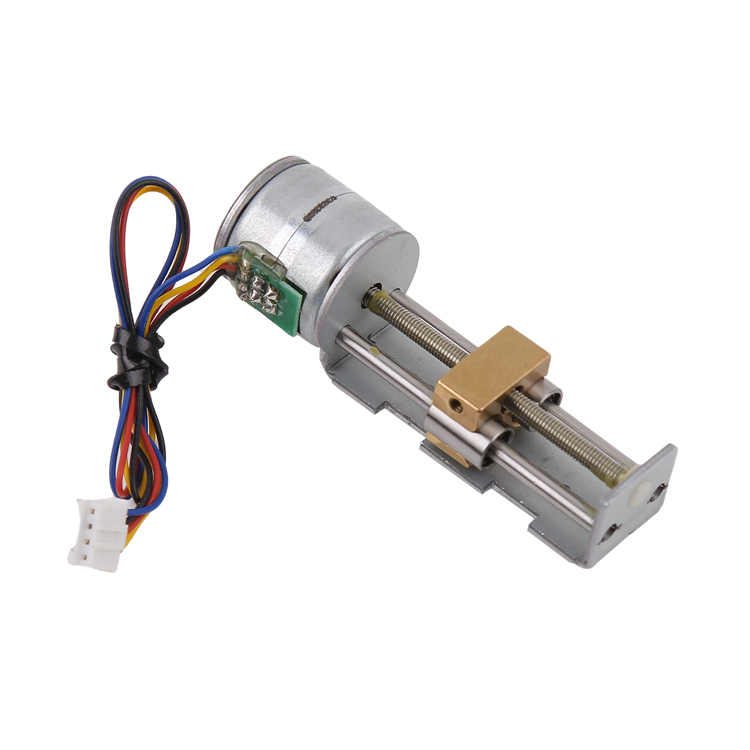
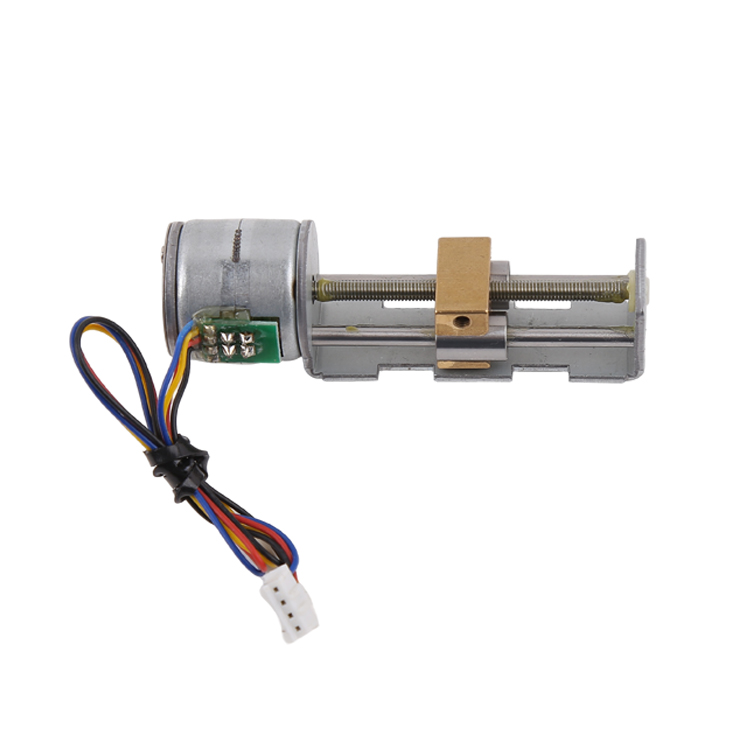
Posisi palaksanaan:Motorna, ngaliwatan mékanisme transmisi sapertos sekrup timah presisi atanapi sabuk timing, ngagerakkeun gerbong anu dieusi ku probe uji pikeun gerak dina bidang sumbu-X sareng sumbu-Y. Sistem ieu mindahkeun susunan probe sacara tepat ka posisi langsung di luhur titik anu badé diuji ku cara ngirimkeun sajumlah pulsa anu khusus.
2. Manajemén komprési sareng tekanan anu dikontrol
Alur kerja:
Aproksimasi sumbu-Z:Saatos ngalengkepan posisi bidang, motor mikro stepper anu tanggung jawab pikeun gerakan sumbu-Z mimiti jalan. Éta nampi pitunjuk sareng ngagerakkeun sakumna sirah tés atanapi hiji modul probe pikeun gerak sacara vertikal ka handap sapanjang sumbu-Z.
Kontrol perjalanan anu tepat:Motorna mencét kalawan lancar dina léngkah-léngkah leutik, sacara tepat ngadalikeun jarak tempuh mesin pres. Ieu penting pisan, sabab jarak tempuh anu pondok teuing tiasa nyababkeun kontak anu goréng, sedengkeun jarak tempuh anu panjang teuing tiasa nyababkeun pegas probe kaleuleuwihi, anu nyababkeun tekanan anu kaleuleuwihi sareng karusakan kana bantalan solder.
Ngajaga Torsi pikeun Nahan Tekanan:Nalika probe ngahontal jerona kontak anu tos ditangtukeun sareng titik uji, motor stepper mikro eureun muter. Dina titik ieu, motor, kalayan torsi anu nahan anu luhur, bakal dikonci pageuh dina tempatna, ngajaga gaya turun anu konstan sareng tiasa dipercaya tanpa peryogi catu daya anu terus-terusan. Ieu mastikeun stabilitas sambungan listrik sapanjang siklus uji. Utamana pikeun uji sinyal frékuénsi luhur, kontak mékanis anu stabil mangrupikeun dasar integritas sinyal.
3. Pamindaian multi-titik sareng uji jalur anu rumit
Alur kerja:
Pikeun PCB kompléks anu meryogikeun uji komponén di sababaraha daérah anu béda atanapi dina jangkungna anu béda, adaptor ngahijikeun sababaraha motor stepper mikro pikeun ngabentuk sistem gerakan multi-sumbu.
Sistem ieu ngoordinasikeun gerakan rupa-rupa motor numutkeun runtuyan tés anu parantos diprogram sateuacanna. Salaku conto, mimitina nguji Area A, teras motor XY gerak sacara koordinasi pikeun mindahkeun susunan probe ka Area B, sareng motor sumbu-Z mencét deui pikeun nguji. Modeu "uji terbang" ieu ningkatkeun efisiensi uji sacara signifikan.
Sapanjang prosésna, kamampuan mémori posisi motor anu tepat mastikeun kabisaulangan akurasi posisi pikeun unggal gerakan, ngaleungitkeun kasalahan kumulatif.
一.Naha milih motor stepper mikro? – Kaunggulan di balik mékanisme kerja
Mékanisme kerja anu tepat anu kasebat di luhur asalna tina ciri téknis motor stepper mikro éta sorangan:
Digitalisasi sareng Sinkronisasi Pulsa:Posisi motor disinkronkeun sacara ketat sareng jumlah pulsa input, ngamungkinkeun integrasi anu mulus sareng komputer sareng PLC pikeun kontrol digital lengkep. Éta mangrupikeun pilihan anu idéal pikeun uji otomatis.
Teu aya kasalahan kumulatif:Dina kaayaan anu henteu kaleuwihan beban, kasalahan léngkah motor stepper henteu akumulasi laun. Akurasi unggal gerakan ngan ukur gumantung kana kinerja bawaan motor sareng supir, mastikeun reliabilitas pikeun uji coba jangka panjang.
Struktur kompak sareng kapadetan torsi anu luhur:Desain miniaturna ngamungkinkeun éta gampang dipasang dina perlengkapan tés anu kompak, bari nyayogikeun torsi anu cekap pikeun ngagerakkeun susunan probe, ngahontal kasaimbangan anu sampurna antara kinerja sareng ukuran.
一.Ngatasi Tangtangan: Téhnologi pikeun Ngaoptimalkeun Efisiensi Padamelan
Sanaos aya kaunggulan anu nonjol, dina aplikasi praktis, motor stepper mikro ogé nyanghareupan tantangan sapertos résonansi, geteran, sareng poténsi leungitna léngkah. Pikeun mastikeun operasi anu sampurna dina adaptor uji jarum éléktronik, industri parantos ngadopsi téknik optimasi ieu:
Aplikasi anu jero ngeunaan téknologi drive micro-stepping:Ngaliwatan micro-stepping, teu ngan ukur résolusi ningkat, tapi anu langkung penting, gerakan motor langkung lancar, sacara signifikan ngirangan geter sareng noise nalika creeping kecepatan rendah, ngajantenkeun kontak probe langkung patuh.
Bubuka sistem kontrol loop katutup:Dina sababaraha aplikasi anu paméntana luhur pisan, encoder ditambahkeun kana motor stepper mikro pikeun ngabentuk sistem kontrol loop katutup. Sistem ieu ngawas posisi motor anu saleresna sacara real time, sareng sakali kaluar tina léngkah (kusabab résistansi anu kaleuleuwihi atanapi alesan sanésna) dideteksi, éta bakal langsung ngabenerkeunana, ngagabungkeun reliabilitas kontrol loop katutup sareng jaminan kaamanan sistem loop katutup.
一.Kacindekan
Singkatna, operasi motor stepper mikro dina adaptor uji jarum éléktronik janten conto anu sampurna pikeun ngarobih pitunjuk digital janten gerakan anu tepat dina dunya fisik. Ku ngalakukeun serangkaian tindakan anu tiasa dikontrol sacara tepat, kalebet nampi pulsa, ngadamel gerakan léngkah mikro, sareng ngajaga posisi, éta ngalaksanakeun tugas penting pikeun panyelarasan anu tepat, pencét anu tiasa dikontrol, sareng pamindaian anu rumit. Éta henteu ngan ukur komponén palaksanaan konci pikeun ngahontal otomatisasi tés tapi ogé mesin inti pikeun ningkatkeun akurasi, reliabilitas, sareng efisiensi tés. Nalika komponén éléktronik terus mekar nuju miniaturisasi sareng kapadetan anu luhur, téknologi motor stepper mikro, khususna téknologi kontrol léngkah mikro sareng loop tertutupna, bakal terus ngadorong téknologi uji éléktronik ka tingkat anu langkung luhur.
Waktos posting: 26 Nopémber 2025